В России рассказали о создании робота-кентавра для колонизации Луны
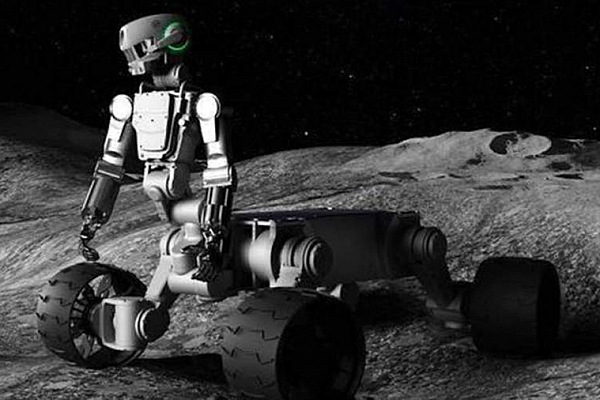
Инженеры НПО «Андроидная техника» и фонда Alpha Robotics Venture разрабатывают роботизированную систему, в задачи которой будет входить освоение Луны. Выполнять различные операции с объектами на поверхности планеты будет часть, строение которой повторяет торс человека. Ее установят на колесную платформу таким образом, что разработка будет напоминать античного кентавра. Об этом пишут "Известия".
Машина будет состоять из трех составляющих: человекоподобный торс, колесная часть и летающий дрон. У каждой из них будет своя система управления, которая позволит им действовать независимо от остальных.
«Торсовая часть будущего робота уже готова. Мобильная платформа сейчас строится. На ней проводятся отладки и доработки, чтобы можно было проводить различные тесты. Через несколько месяцев должны начаться испытания», — сказал глава компании Alpha Robotics Venture Владимир Белый.
В разработке будет использован опыт, полученный создателями во время проектирования Теледройда — антропоморфного торсового робота, который успешно прошел испытания на МКС. Использованные в нем технические решения переработают под условия, которые существуют на Луне. Так, например, в отличие от орбиты, там есть гравитация.
Машину предполагается использовать для сооружения обитаемой станции на Луне. Она должна подготовить там всё необходимое до того, как там появится человек. Чтобы преодолевать сложный рельеф, все четыре колеса системы должны иметь независимые двигатели и поворачиваться вокруг своей оси. При этом их сделают из титана и оснастят сверхпрочными подшипниками. В случае, если несколько колес сломается, устройство продолжит функционировать благодаря оставшимся.
Планируется, что оператор будет управлять торсовой частью робота, используя шлем виртуальной реальности и экзоскелет. Машина в точности повторит все движения человека, который благодаря системе тактильной и силовой обратной связи сможет ощутить плотность, вес и габариты предметов, с которыми имеет дело. Такое техническое решение позволяет лучше управлять системой и избежать поломок. Вероятно, что на колесную часть установят еще один манипулятор, который сможет действовать в радиусе 5 м вокруг себя и в случае поломки ремонтировать другие составляющие робота.