Японский лунный модуль SLIM перешел в спящий режим до середины февраля
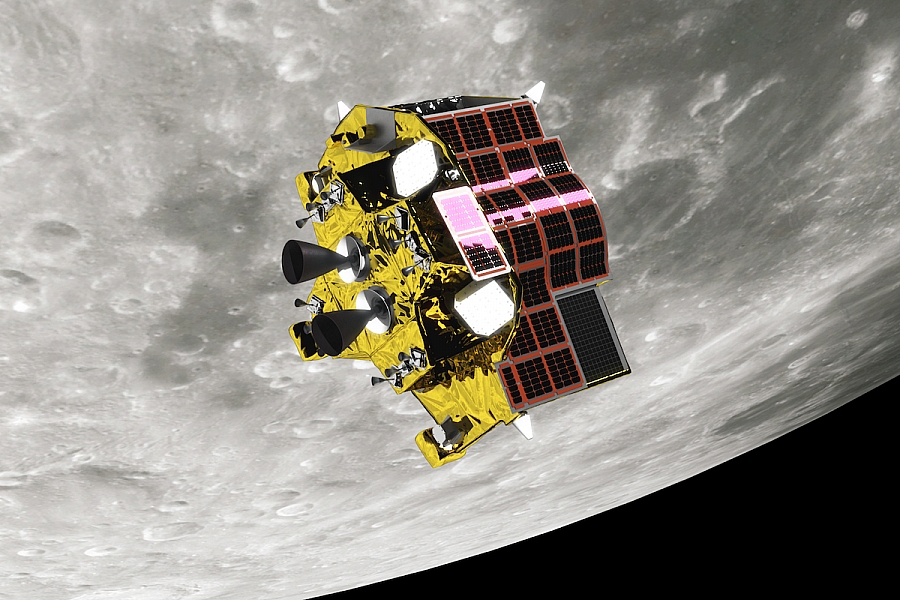
Совершивший 20 января посадку на Луне первый японский лунный модуль SLIM перешел в спящий режим из-за нехватки энергии, получаемой от солнечных батарей. Об этом сообщает ТАСС со ссылкой на агентство Kyodo.
Как рассказали в Японском агентстве аэрокосмических исследований (JAXA), модуль попытается возобновить работу в середине февраля, когда солнце начнет вновь нагревать его батареи.
Через несколько часов после посадки 20 января, примерно в 00:20 по токийскому времени (18:20 мск 19 января), аппарат был выключен, поскольку испытывал проблемы с получением энергии от солнечных элементов и питался за счет встроенного аккумулятора. Работу аппарата удалось восстановить 29 января, вероятно, из-за смены угла падения солнечных лучей на Луну. Как отмечает JAXA, в ходе последнего 12-часового рабочего сеанса модуль с помощью спектроскопической камеры провел анализ лунного грунта в районе посадки. Японские специалисты присвоили названия некоторым крупным камням, находящимся поблизости от аппарата, используя при этом породы собак, таких как бигль, акита-ину и прочие.
Япония стала пятой страной в мире, посадившей свой модуль на естественный спутник Земли. Ранее это смогли сделать СССР, Индия, Китай и США. Аппарат удалось посадить всего в 55 м от намеченной точки в районе кратера Сиори на видимой стороне Луны. Таким образом, специалисты JAXA выполнили поставленную задачу, обеспечив сверхточную посадку в радиусе не более 100 м от заданной цели.
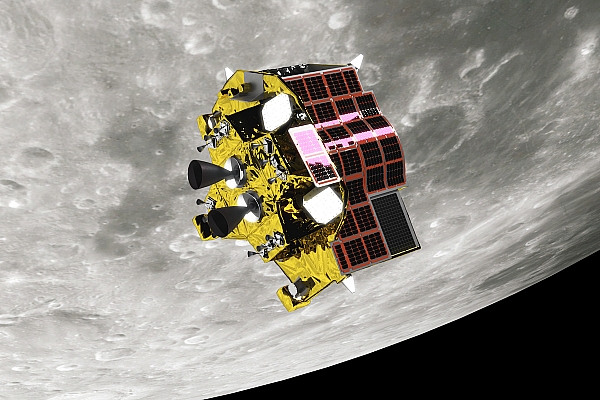
Аппарат SLIM высотой 2,4 м и массой 200 кг предназначен для изучения кратеров и рельефа Луны с помощью технологий, аналогичных применяемым в системах распознавания лиц. SLIM оснащен специальной камерой, которая позволяет измерять содержание железа и других элементов в породах на лунной поверхности. Полученные аппаратом данные предполагается использовать, в частности, в рамках лунной программы Artemis Национального управления США по аэронавтике и исследованию космического пространства.
Японский модуль также оснащен двумя небольшими роботами. Планировалось, что после прилунения каждый из них будет использовать собственную широкоугольную камеру для съемки. Робот LEV-1 высотой 30 см применяет пружины для передвижения. Он также играет роль устройства для записи и передачи данных на Землю. Робот LEV-2 имеет форму шара диаметром около 8 см и весом 250 г.